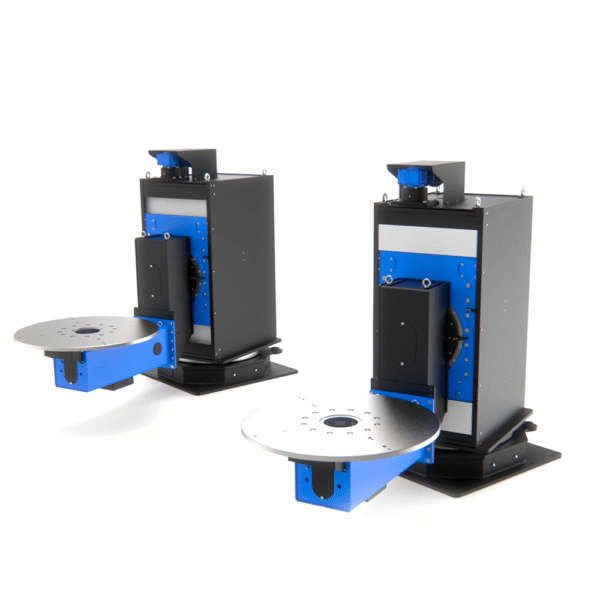
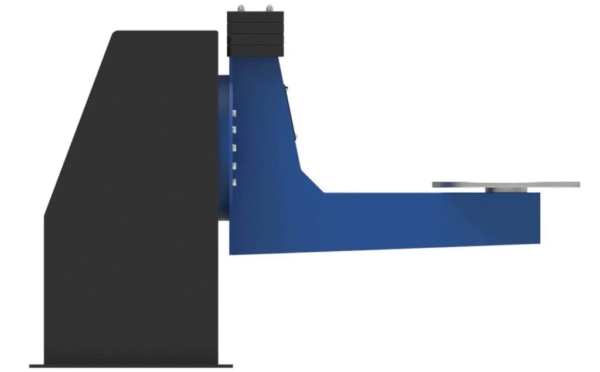
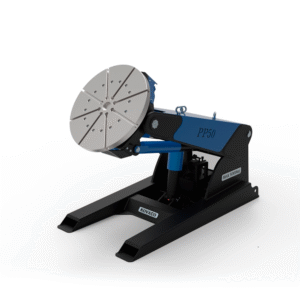
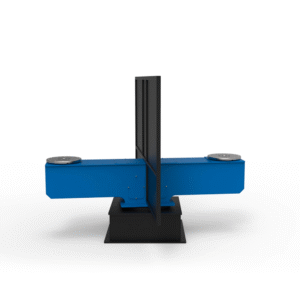
A rotary three-axis positioner for robotic applications. The configuration of the positioner, when using two of them, allows both welding and exchanging of welded parts simultaneously.
After welding is complete, the positioners rotate 180° on the swivel base and the operator can exchange the parts on one of them while the robot is welding on the other. When the work is finished, the positioners rotate 180° again and the cycle can be repeated. The use of ball screws for lifting, and precision cycloidal gearboxes for arm and table rotation allow fast and accurate positioning of the welded parts. The interface of the individual axis gearboxes is adapted to servomotors according to customer requirements.